Probably the simplest BIP in the world (the long story)#
Contents of this notebook: #
Learning objectives: #
Create a linear forward model object in CUQIpy and apply it to some parameters
Create a distribution object in CUQIpy that represents the prior and the noise, and sample, and visualize it
Create and design data distributions in CUQIpy for additive and multiplicative noise case and visualize it
Compute the MAP estimate in CUQIpy
Write the minimization problem that corresponds to finding the MAP estimate
Sample from the posterior distribution in CUQIpy and visualize the samples
The forward model #
Consider the following inverse problem: given observed data \(b\), determine \(x_1\), and \(x_2\):
We can write it as:
variable |
description |
dimension |
|---|---|---|
\(\mathbf{x}\) |
parameter to be inferred |
2-dimensional |
\(\mathbf{A}\) |
forward model |
1-by-2 matrix |
\(b\) |
data |
1-dimensional |
\(e\) |
noise |
1-dimensional |
This problem is:
Considered a Linear inverse problem since the forward model is linear.
Ill-posed since the solution is not unique (Hadamard 2), i.e., for some given value of \(b\), e.g., \(b=3\), all points \((x_1, x_2)\) that satisfy \(x_1 + x_1 = 3\) are solutions to the (noise-free) problem.
Show code cell content
# Importing the required libraries
from cuqi.distribution import Gaussian
from cuqi.problem import BayesianProblem
from cuqi.model import LinearModel
import numpy as np
import matplotlib.pyplot as plt
Let us define the forward model \(\mathbf{A}\), we first define the matrix:
A_matrix = np.array([[1.0, 1.0]])
Verify the dimension of the forward model matrix \(\mathbf{A}\)
A_matrix.shape
(1, 2)
Now we wrap A_matrix in a CUQIpy forward model object as follows:
A = LinearModel(A_matrix)
Let us test applying the forward model to some parameters:
some_x = np.array([1.0, 2.0])
print(A@some_x)
[3.]
Exercise #
Try applying
Ato a different input arrayCreate a new linear forward model
Bthat represents the identity matrix of dimension 3 and apply it to some parametersPrint both of the models with
print(A)andprint(B), what do you observe?Run
help(LinearModel)to see the documentation of the class and the input argumentsIs this true for you: “I learned how to create a linear forward model object in CUQIpy and apply it to some parameters.”? If not, what questions do you have?
# your code here
Elaboration on Geometries #
In CUQIpy, we have the concept of geometries to represent spaces of parameters and data, let us refer to both as variables.
A
Geometryobject will define the dimension of the space of the variable.It will define the interpretation of the variable values (e.g. values of function on a 1D or 2D grid, discrete values, coefficients in some expansion, image pixels, etc).
It is equipped with methods of plotting the variables.
We notice that printing the forward model object A, for example, gives us
CUQI LinearModel: _DefaultGeometry1D(2,) -> _DefaultGeometry1D(1,).
Forward parameters: ['x'].
The first geometry
_DefaultGeometry1D(2,)is thedomain_geometrywhich represents the input space of the forward model, i.e., the space of the parameters \(x_1\) and \(x_2\).The second geometry
_DefaultGeometry1D(1,)is therange_geometrywhich represents the output space of the forward model, i.e., the space of the data \(b\).The forward parameters
['x']are the parameters that the forward model operates on, in this case, the parameters \(x_1\) and \(x_2\).You can access the domain and range geometries of the forward model object
AbyA.domain_geometryandA.range_geometryrespectively.
print(A.domain_geometry)
print(A.range_geometry)
_DefaultGeometry1D(2,)
_DefaultGeometry1D(1,)
The
_DefaultGeometry1Dis a simple geometry that is used as a default geometry in CUQIpy if the user does not specify a geometry.We will revisit this concept at a later stage depending on forward models needs.
The prior #
Bayesian approach: Use prior to express belief about solution#
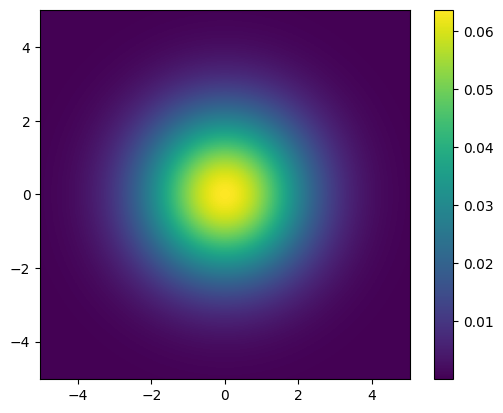
A common choice for simplicity is the zero mean Gaussian prior where the components are independent and identically distributed (i.i.d.):
The probability density function (PDF) of such a Gaussian prior is expressed as
where:
\(n\) is the dimension of the parameter space (which is 2 in this specific case),
\(\delta\) is the standard deviation of the prior distribution,
\(\mathbf{I}\) is the identity matrix.
Let us define the prior distribution for the parameters \(x_1\) and \(x_2\):
x = Gaussian(np.zeros(2), 2.5)
Show code cell content
def plot2d(val, x1_min, x1_max, x2_min, x2_max, N2=201):
# plot
pixelwidth_x = (x1_max-x1_min)/(N2-1)
pixelwidth_y = (x2_max-x2_min)/(N2-1)
hp_x = 0.5*pixelwidth_x
hp_y = 0.5*pixelwidth_y
extent = (x1_min-hp_x, x1_max+hp_x, x2_min-hp_y, x2_max+hp_y)
plt.imshow(val, origin='lower', extent=extent)
plt.colorbar()
def plot_pdf_2D(distb, x1_min, x1_max, x2_min, x2_max, N2=201):
N2 = 201
ls1 = np.linspace(x1_min, x1_max, N2)
ls2 = np.linspace(x2_min, x2_max, N2)
grid1, grid2 = np.meshgrid(ls1, ls2)
distb_pdf = np.zeros((N2,N2))
for ii in range(N2):
for jj in range(N2):
distb_pdf[ii,jj] = np.exp(distb.logd([grid1[ii,jj], grid2[ii,jj]]))
plot2d(distb_pdf, x1_min, x1_max, x2_min, x2_max, N2)
We can plot the prior PDF for the parameters \(x_1\) and \(x_2\):
plot_pdf_2D(x, x1_min=-5, x1_max=5, x2_min=-5, x2_max=5)
/tmp/ipykernel_1809/403389231.py:23: DeprecationWarning: Conversion of an array with ndim > 0 to a scalar is deprecated, and will error in future. Ensure you extract a single element from your array before performing this operation. (Deprecated NumPy 1.25.)
distb_pdf[ii,jj] = np.exp(distb.logd([grid1[ii,jj], grid2[ii,jj]]))
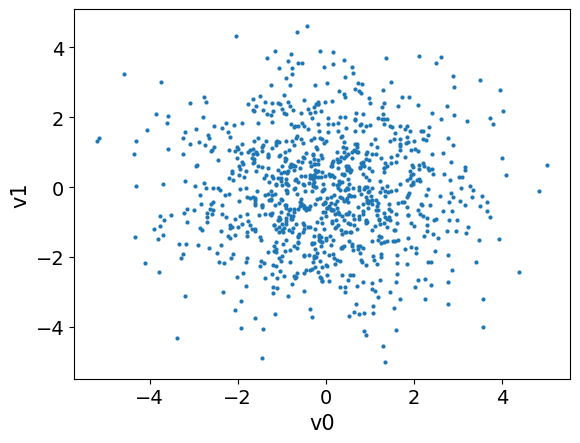
We can sample from the prior distribution:
x_samples = x.sample(1000)
We can visualize the samples from the prior distribution, one way to do this is to plot samples pair plot:
x_samples.plot_pair()
<Axes: xlabel='v0', ylabel='v1'>
Exercise #
Can you generate one plot where you visualize the prior PDF and the pair plot together? (tip: after plotting the PDE, you can pass the
pyplotcurrent axis toplot_pairmethod by passing the keyword argumentax=plt.gca())Does the samples seem to represent the prior distribution correctly?
x_1andx_2of the prior distribution are independent and identically distributed random variables. In this exercise: a. Define a new Gaussian distributionx_exercisewherex_1andx_2are correlated with covariance of 0.7. Setx_1variance to 1 andx_2variance to 4 for. The covariance matrix is given by:\[\begin{split}\begin{bmatrix} 1 & 0.7 \\ 0.7 & 4 \end{bmatrix}\end{split}\]Visualize the PDF of the new distribution
x_exerciseand the pair plot of the samples from the distribution in one plot. What do you observe?Is this true for you: “I learned how to create a distribution object in CUQIpy that represents the prior, sample it, and visualize it”? If not, what questions do you have?
# your code here
The noise distribution #
As mentioned earlier, we assume \(e \sim \mathrm{Gaussain}(0, 0.1)\)
We can define the noise distribution as follows:
e = Gaussian(0, 0.1)
We print the noise distribution object:
print(e)
CUQI Gaussian.
We draw some samples from the noise distribution:
samples = e.sample(10000)
And visualize them. One way to do that is to use the trace plot in CUQIpy:
samples.plot_trace()
array([[<Axes: title={'center': 'v'}>, <Axes: title={'center': 'v'}>]],
dtype=object)

On the left is a kernel density estimation (KDE) of the samples, and on the right is the trace plot of the samples.
Let us also plot the PDF of the noise distribution, using the python function plot_pdf:
def plot_pdf_1D(distb, min, max):
grid = np.linspace(min, max, 1000)
y = [distb.pdf(grid_point) for grid_point in grid]
plt.plot(grid, y)
plot_pdf_1D(e, -1.5, 1.5)

Exercise #
Create another noise distribution
e_exercisewith mean 0 and variance 0.5 and plot its PDFPlot the PDF of the noise distribution
e_exerciseand the noise distributioneon the same plotWhat do you observe?
Is this true for you: “I learned how to create a distribution object in CUQIpy that represents the noise level and visualize it”? If not, what questions do you have?
# your code here
The data distribution #
The noise in the measurement data follows \(e \sim \mathrm{Gaussain}(0, 0.1)\) and due to the relation \(b = \mathbf{A}\mathbf{x} + e \), we can write
and in this case we specify \(\sigma^2 = 0.1\).
The data distribution is the conditional distribution of \(b\) given \(\mathbf{x}\).
This PDF can only be evaluated for a given \(\mathbf{x}\).
We create the data distribution object as follows:
b = Gaussian(A@x, 0.1)
We print the data distribution object:
b
CUQI Gaussian. Conditioning variables ['x'].
Note that we can not sample from this distribution directly. If we try, we will get an error:
# Here we catch the error and print it
try:
b.sample(10)
except Exception as e:
print(e)
Cannot sample from conditional distribution. Missing conditioning variables: ['x']
Before sampling or evaluating the PDF of b, we need to specify the value of the parameters x, let us choose the following value:
particular_x = np.array([1.5, 1.5])
Then we condition the data distribution b on the given parameter particular_x:
b_given_particular_x = b(x=particular_x)
Now we have the distribution object b_given_particular_x that represents the data distribution given a particular value of the parameters x. We can now plot the PDF of this distribution:
plot_pdf_1D(b_given_particular_x, 1.5, 4.5)
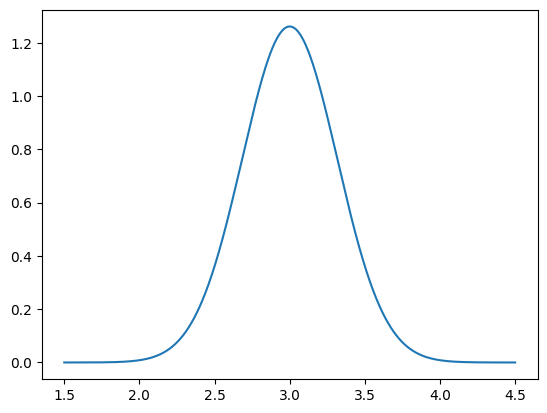
We can use b_given_particular_x to simulate noisy data assuming that the true x parameters is particular_x:
b_obs = b_given_particular_x.sample()
print(b_obs)
2.6118505104795755
Exercise #
Print the distribution object
b_given_particular_x, how does the output differ from printingb.What is the ratio of the noise in the data (the noise in
b_obs) to the true data.Explain how the data distribution is different from the noise distribution.
Assume we have a multiplicative noise case in which the level of the noise depends on the model output, i.e., \(b = (\mathbf{A}\mathbf{x}) e\) where \(e \sim \mathrm{Gaussain}(1, 0.1)\).
What is the corresponding data distribution?
Define the data distribution in CUQIpy and call it
b_mult. Plot its PDF (condition onparticular_x). Tip: you can use lambda function to define theGaussiancovariancelambda x : 0.1*(A@x)**2.Plot the PDF of the data distribution
b_multgivenx=particular_x.In general, for the given
x_particular, how does the noise to the exact data ratio change in the case ofb_multcompared tob?Plot the PDF of the data distribution
b_multgiven a different value ofx=np.array([0.4, 0.3]). What can we say about the noise ratio to the exact data in this case? and why?
Is this true for you: “I learned how to create and design data distributions in CUQIpy and visualize it for a given parameter”? If not, what questions do you have?
# your code here
The likelihood function #
Likelihood function: by fixing observed data \(b^\mathrm{obs}\) in the data distribution and considering the function of \(\mathbf{x}\):
Example, given observed data \(b^\mathrm{obs} \)
In CUQIpy, we can define the likelihood function as follows:
likelihood = b(b=b_obs)
print(likelihood)
CUQI Gaussian Likelihood function. Parameters ['x'].
Note that the likelihood function is a density function and is not a distribution. If we try to compute pdf for example, we will get an error:
try:
likelihood.pdf(x=particular_x)
except Exception as e:
print(e)
'Likelihood' object has no attribute 'pdf'
while for example, we can evaluate the pdf for the distribution x:
x.pdf(particular_x)
array([0.02588303])
For the likelihood function, we can evaluate its log-density:
likelihood.logd(x=particular_x)
CUQIarray: NumPy array wrapped with geometry.
---------------------------------------------
Geometry:
_DefaultGeometry1D(1,)
Parameters:
True
Array:
CUQIarray([-0.52094612])
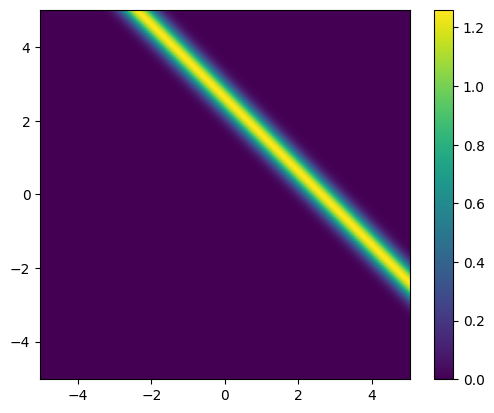
We plot the likelihood function for the observed data b_obs:
x1_lim = np.array([-5, 5])
x2_lim = np.array([-5, 5])
plot_pdf_2D(
likelihood,
x1_min=x1_lim[0], x1_max=x1_lim[1],
x2_min=x2_lim[0], x2_max=x2_lim[1])
/tmp/ipykernel_1809/403389231.py:23: DeprecationWarning: Conversion of an array with ndim > 0 to a scalar is deprecated, and will error in future. Ensure you extract a single element from your array before performing this operation. (Deprecated NumPy 1.25.)
distb_pdf[ii,jj] = np.exp(distb.logd([grid1[ii,jj], grid2[ii,jj]]))
Maximum likelihood (ML) point estimate #
Equivalently, minimizer of negative log of likelihood
In the case of Gaussian noise is the least-squares solution
We plot likelihood function again but with line \(x_2 = b^{obs}-x_1\):
# Plot the likelihood
plot_pdf_2D(
likelihood,
x1_min=x1_lim[0], x1_max=x1_lim[1],
x2_min=x2_lim[0], x2_max=x2_lim[1])
# Plot the line x2 = b_obs - x1
plt.plot(x1_lim, b_obs-x1_lim, '--r')
plt.ylim(x2_lim)
/tmp/ipykernel_1809/403389231.py:23: DeprecationWarning: Conversion of an array with ndim > 0 to a scalar is deprecated, and will error in future. Ensure you extract a single element from your array before performing this operation. (Deprecated NumPy 1.25.)
distb_pdf[ii,jj] = np.exp(distb.logd([grid1[ii,jj], grid2[ii,jj]]))
(-5.0, 5.0)
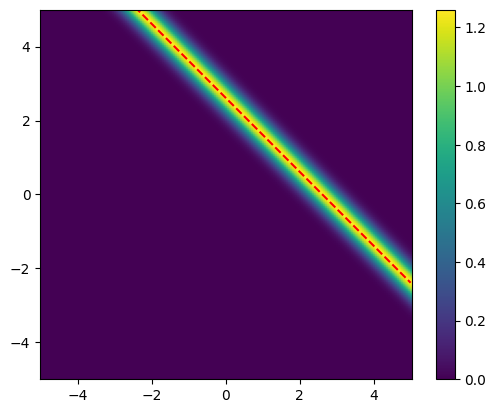
Note that:
All the points on the line \(x_2 = b^{obs}-x_1\) have the same likelihood value.
No unique ML point
This is expected, since problem we are solving is: \(b^{obs} = x_1 + x_2\)
Combining the likelihood with the prior will give us a unique maximum a posteriori (MAP) point estimate as we will see next.
The posterior distribution #
Bayes’ rule#
The posterior is proportional to product of likelihood and prior $\(\pi(\mathbf{x} | b) \propto \pi( b|\mathbf{x})\pi(\mathbf{x})\)$
Note that \(\pi( b|\mathbf{x})\) here denotes the likelihood and not the data distribution, despite often written that way.
In CUQIpy, we can use the class BayesianProblem to bundle the prior, the data distribution, and the data, then use it to explore the posterior distribution (e.g. point estimate and sampling):
BP = BayesianProblem(b, x)
print(BP)
BayesianProblem with target:
JointDistribution(
Equation:
p(b,x) = p(b|x)p(x)
Densities:
b ~ CUQI Gaussian. Conditioning variables ['x'].
x ~ CUQI Gaussian.
)
Now we pass the data:
BP.set_data(b=b_obs)
print(BP)
BayesianProblem with target:
Posterior(
Equation:
p(x|b) ∝ L(x|b)p(x)
Densities:
b ~ CUQI Gaussian Likelihood function. Parameters ['x'].
x ~ CUQI Gaussian.
)
Note the difference in the target of the BayesianProblem object before and after passing the data.
Maximum a posteriori (MAP) estimate #
Maximizer of the posterior
In the case with Gaussian noise and Gaussian prior, this is the classic Tikhonov solution
Exercise #
Use the
BayesianProblemobject to compute the MAP estimate. Objects of the classBayesianProblemhave a methodMAPthat computes the MAP estimate.Print the solution (the MAP estimate) and compare it to the true solution
particular_x, what do you observe? If they are different, why?Is this true for you: “I learned how to compute the MAP estimate in CUQIpy”? If not, what questions do you have?
Is this true for you: “In paper and pencil, I can write the minimization problem that corresponds to finding the MAP estimate”? If not, what questions do you have?
# your code here
Sampling from the posterior #
The MAP point is a very useful point estimate, but it does not provide information about the uncertainty in the estimate. Thus, we need to sample from the posterior distribution to quantify the uncertainty.
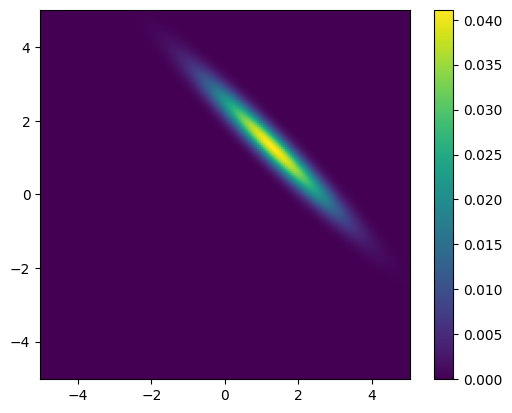
Before sampling from the posterior distribution, let us plot the posterior distribution.
Note that in this example the posterior distribution is a multivariate distribution of two parameters only and it is easy to evaluate the PDF of the posterior distribution over a grid of points in the parameter space. However, typically, the posterior distribution is high-dimensional and evaluating the PDF over an n-dimensional grid is not feasible.
plot_pdf_2D(BP.posterior, x1_lim[0], x1_lim[1], x2_lim[0], x2_lim[1])
/tmp/ipykernel_1809/403389231.py:23: DeprecationWarning: Conversion of an array with ndim > 0 to a scalar is deprecated, and will error in future. Ensure you extract a single element from your array before performing this operation. (Deprecated NumPy 1.25.)
distb_pdf[ii,jj] = np.exp(distb.logd([grid1[ii,jj], grid2[ii,jj]]))
Exercise #
Use the
BayesianProblemobject to sample from the posterior distribution. Objects of the classBayesianProblemhave a methodsample_posteriorthat samples from the posterior distribution. You can usehelp(BP.sample_posterior)to see the documentation of the method.The method
sample_posteriorreturns aSamplesobject, which is the same type of object that is returned by thesamplemethod of theDistributionclass. Visualize the posterior samples using theplot_tracemethod of theSamplesobject.Similar to what you did for the prior, plot the pair plot of the posterior samples over the prior PDF (in the same plot). Are the samples consistent with the posterior distribution PDF?
Is this true for you: “I learned how to sample from the posterior distribution in CUQIpy and visualize the samples”? If not, what questions do you have?
# your code here